
南部沿海某電廠通航航道測量
1. 項目背景
北京海卓同創科技有限公司參與某港池航道及取水口水域工程的掃海測量任務,主要目的是對碼頭港池航道、取水口的維護測量,獲得掃測區域水深數據信息及水下地形現狀,檢測測區回淤情況,以及取得區域內淺點資料用以指導船舶通航、靠泊。
1.1. 掃測區域介紹
本次掃測包括兩個測量區域,其一為港池和航道水域,其二為取水口區域。面積約2.75平方公里。掃測采用多波束測深技術進行掃海作業。如下圖為掃測區域示意圖:
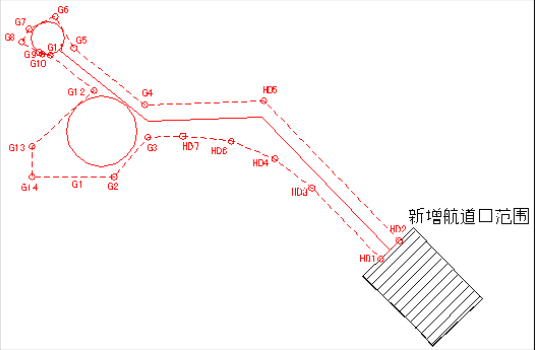
圖1.1 掃測區域規劃范圍
2.測試設備
海卓MS400(勞模)是北京海卓同創科技有限公司最新研制的高頻淺水多波束測深儀,主要面向內河、港口、航道、海岸帶等淺水領域應用,擁有便攜式、高分辨和高性能等方面的特點,可減少操作人員的現場工作。
海卓MS400(勞模)內置姿態儀,將聲學基陣與姿態測量、GPS集成于一體,可免去用戶測量時安裝校準的繁瑣過程,同時也兼容外部高精度姿態儀。

圖2.2 MS400多波束測深儀
3、測量實施
本次測量采用了MS400多波束測深系統+外部姿態儀+外部GPS的組合方式進行測量。
如下圖為MS400多波束測深系統系統組成示意圖。
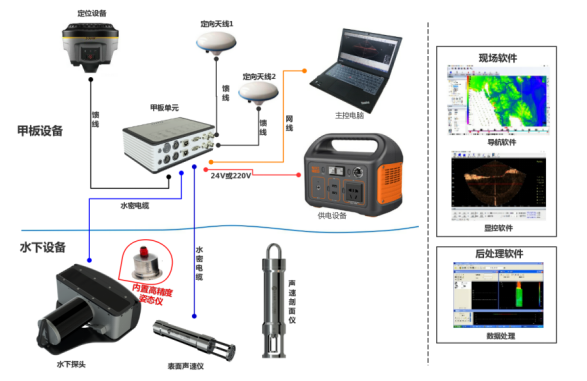
圖3.1 MS400多波束測深系統系統組成示意圖
3.1 外業測量實施
3.1.1設備安裝
本次測試根據測量船特性,采用多波束安裝支架+轉接法蘭的形式,測量采用多波束懸掛安裝測量的形式。
如下圖為現場多波束安裝支架和轉接法蘭圖片:

圖3.2 多波束安裝支架和轉接法蘭圖片
如下圖為MS400多波束現場安裝情況。

圖3.3 測量船

圖3.4 多波束及安裝支架
3.1.2. 測線布設
測線布設的主要原則是滿足測區的多波束全覆蓋測量,相鄰測線間的條帶重疊不小于20%。本項目多波束掃海測量測線布設如下:
港池、調頭區及部分航道掃海主測線按平行于碼頭前沿線布設,測線間距按4倍水深靈活布設,保證多波束能全覆蓋掃測,本區域共布設28條主測線;主測線長約27km。航道主測線按平行于航道中心線方向布設,共布設11條主測線,長約38km。垂直主測線方向共布設6條檢查線,長約0.75km,測線布設見下圖所示:
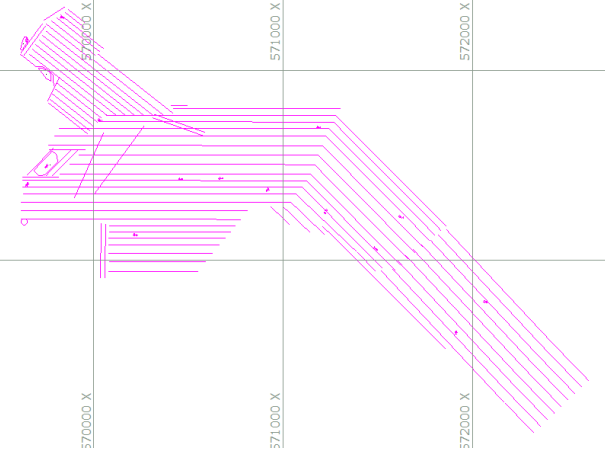
圖3.7 測線布設圖
1.1.1. 聲速剖面數據采集
本次測量由于現場情況比較復雜,除了最初設計的SVP數據采集地點進行聲速剖面數據采集外,在航道最遠端還臨時增加了一個SVP數據采集點,兩端、中間轉彎處共三個SVP數據采集點,如下圖為SVP采集點位置分布圖和工程師現場采集聲速剖面數據照片:
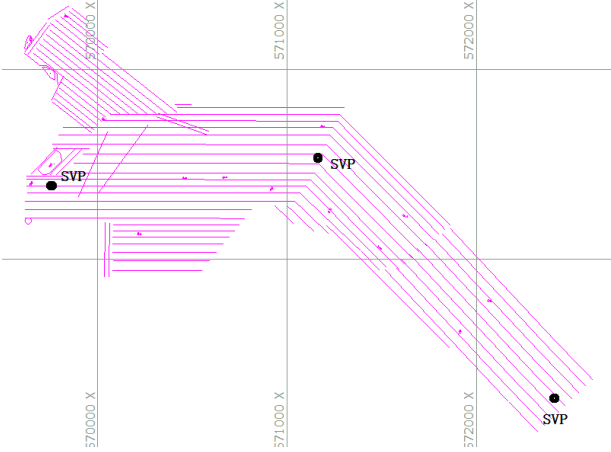
圖3.8 SVP采集點分布圖

圖3.9 工程師采集聲速剖面數據
1.1.2. 多波束數據采集
MS400多波束測深系統安裝完畢之后,現場采用顯控軟件和導航采集軟件進行顯控聲納控制和數據采集,如下圖為現場數據采集和導航:
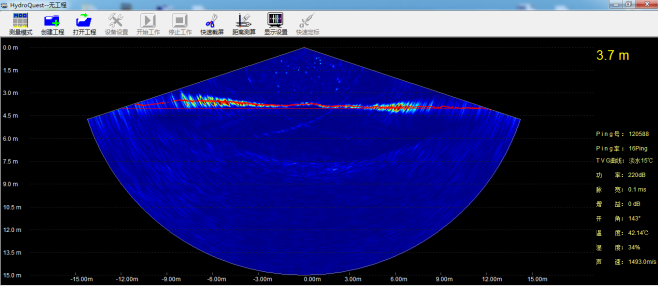
圖3.10 顯控軟件圖片
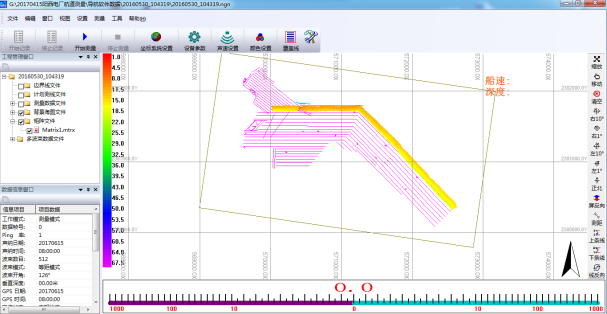
圖3.11 導航軟件界面
4. 數據后處理
多波束后處理主要采用hypack軟件對數據進行處理,主要流程包括數據轉換、數據加載、多波束安裝偏差校準、條帶編輯、斷面編輯,成果輸出等。
下面將主要的流程進行簡單描述。
4.1. 數據加載
Hypack對此次測量的數據加載后,我們可以根據實際的有效測線進行初步甄別,從而使內業的工作效率更高,如下圖為實際有效的測區測線數據航跡線:
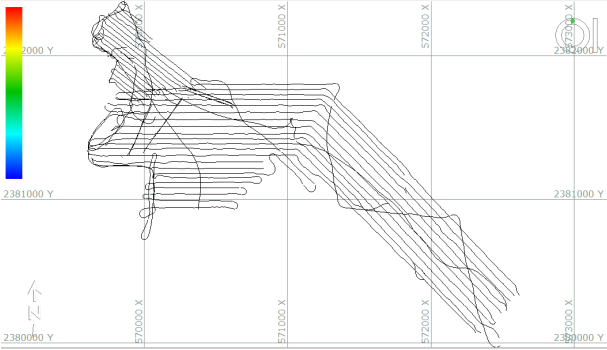
圖4.1 測區測線航跡線
4.2. 多波束安裝偏差校準
數據加載后首先對數據進行多波束安裝校準工作,如下圖為采用hypack軟件對多波束進行校準的界面。

圖4.2 hyapck校準界面
4.3. 條帶編輯
利用hypack軟件對條帶數據進行噪點刪除作業。
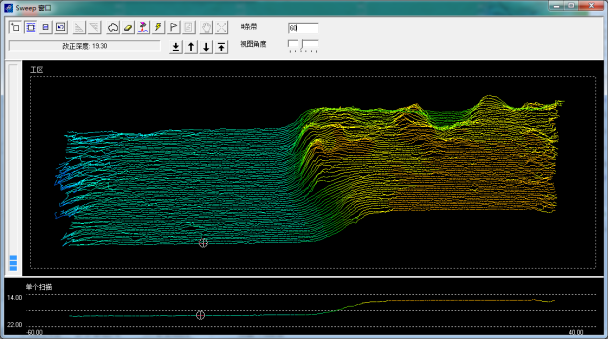
圖4.3 hypack條帶編輯界面
4.4. 斷面編輯
使用hypack軟件對數據進行條帶編輯之后,通過三級編輯階段的斷面噪點刪除的方法對噪點數據進行刪除。
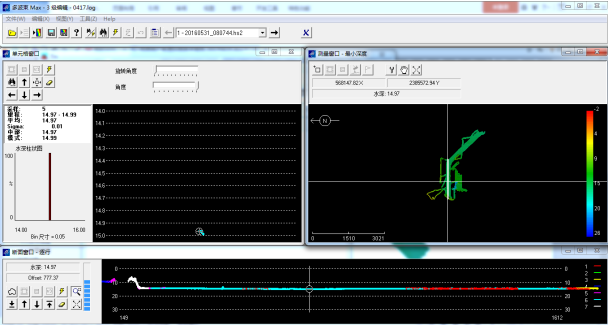
圖4.4 hyapck斷面編輯界面
5. 數據成果
經過以上數據處理工作,我們就可以輸出測區的水深數據,同時可以為后續的工作提供數據依據。
5.1. 水深圖
多波束測深數據直接的測量成果——水深數據,如下圖為此次掃測水深數據成果按照不同深度不同顏色展示的效果圖:
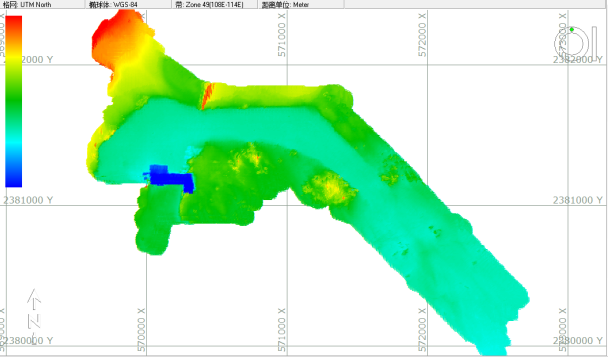
圖5.1 整體水深效果圖
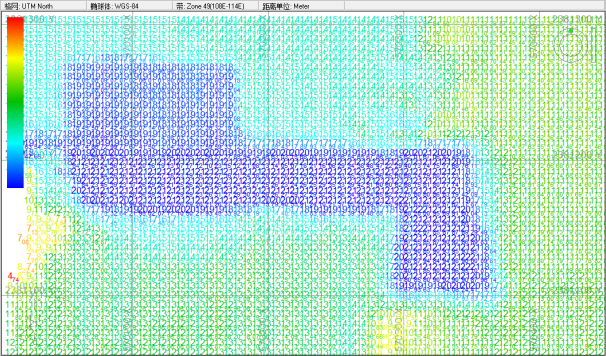
圖5.2 局部水深展點圖
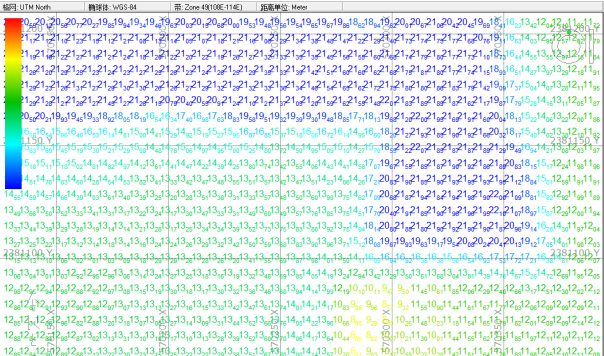
圖5.3 局部水深展點圖
5.2. 三維點云圖
得到水深數據后,我們通過點云工具直接以點云的形式展現測區水底情況,如下圖為水底的三維點云圖:
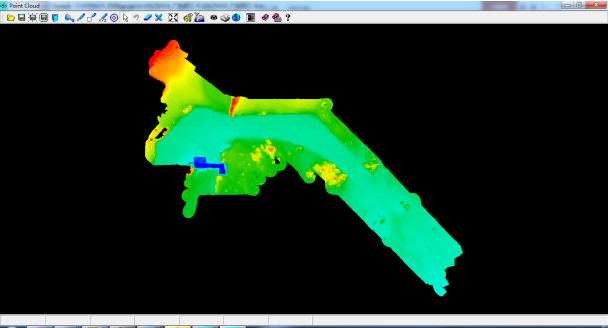
圖5.4 整體三維點云圖-俯視
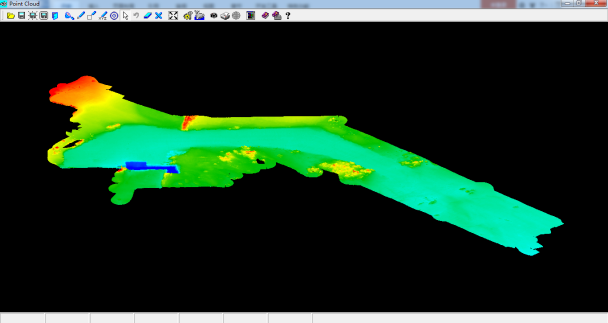
圖5.5 整體三維點云圖-斜視
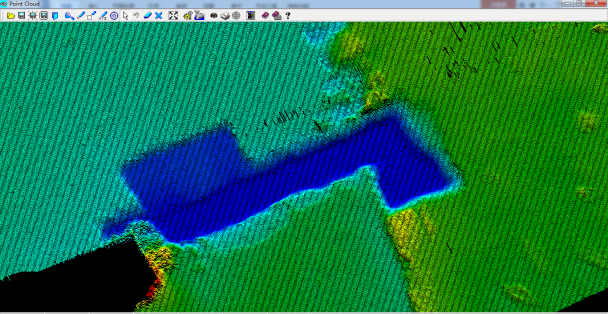
圖5.6 局部三維點云圖
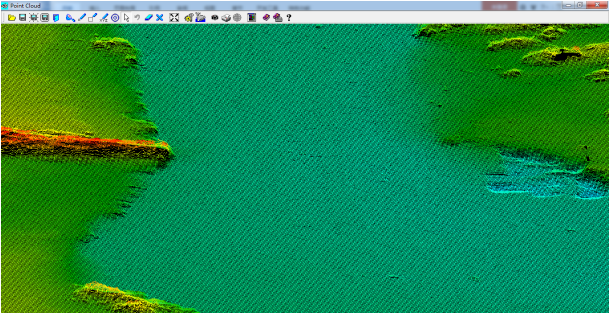
圖5.7 局部三維點云圖
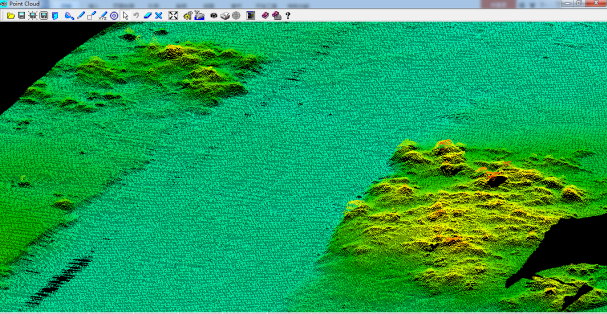
圖5.8 局部三維點云圖
6. 結論
港池航道水域采用多波束進行全覆蓋測量,數據密度和測量精度滿足掃海測量的技術要求。
;)